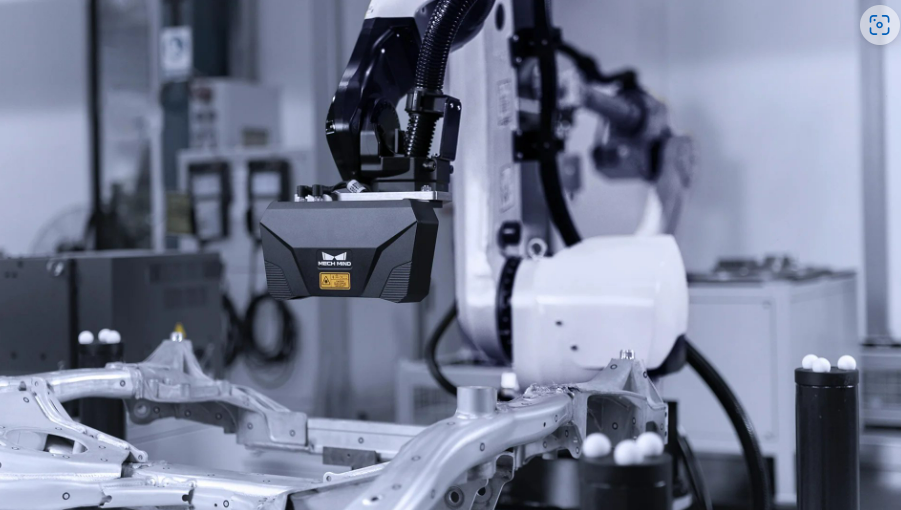
Capteurs 3D
Les capteurs Mech-Eye sont des capteurs de vision 3D développés par la société Mech-Mind utilisant la technologie de lumière structurée pour capturer des images tridimensionnelles de l’environnement.

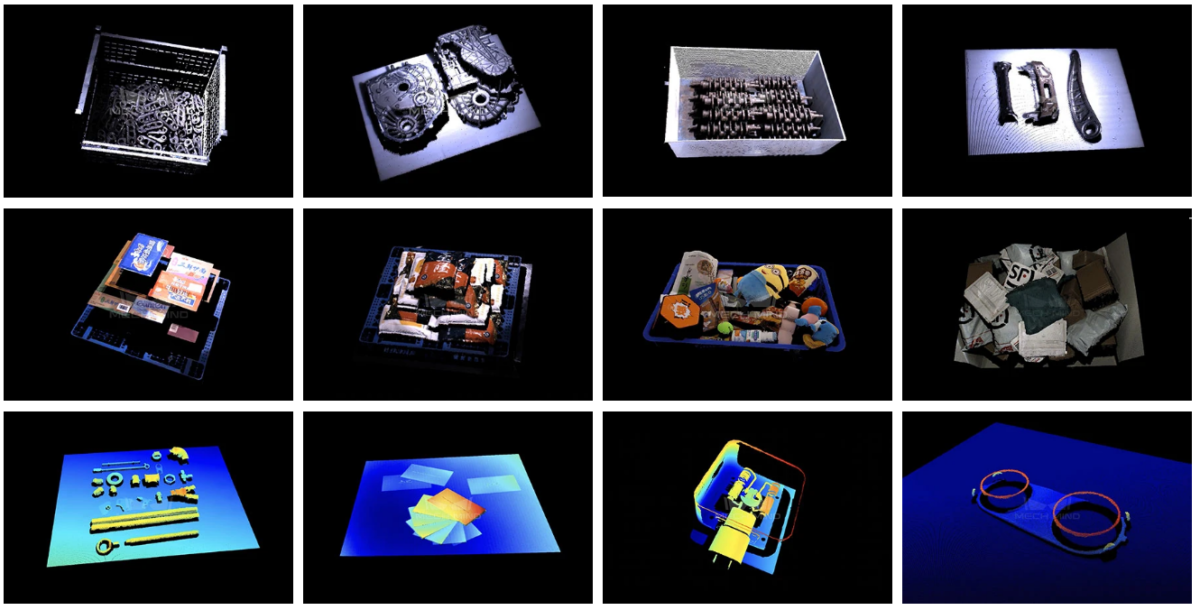
Acquisition de nuages de points 3D
Les capteurs Mech-Eye peuvent capturer des images 3D détaillées de l’environnement. Ils produisent des nuages de points 3D haute résolution, sur une grande variété d’objets. Différents modèles sont disponibles pour satisfaire divers besoins (résistance à la lumière ambiante, haute précision, grande vitesse de numérisation, objets de petite taille, etc.).
Exemple de nuages de points
Des capteurs pensés pour l’industrie

Boîtier en aluminium robuste

Images 3D haute résolution

Étanche à la poussière et à l’eau

Configuration facile et déploiement rapide

Numérisations fiables

Plusieurs options et modèles
Exemples d’utilisation sur vos chaînes de production
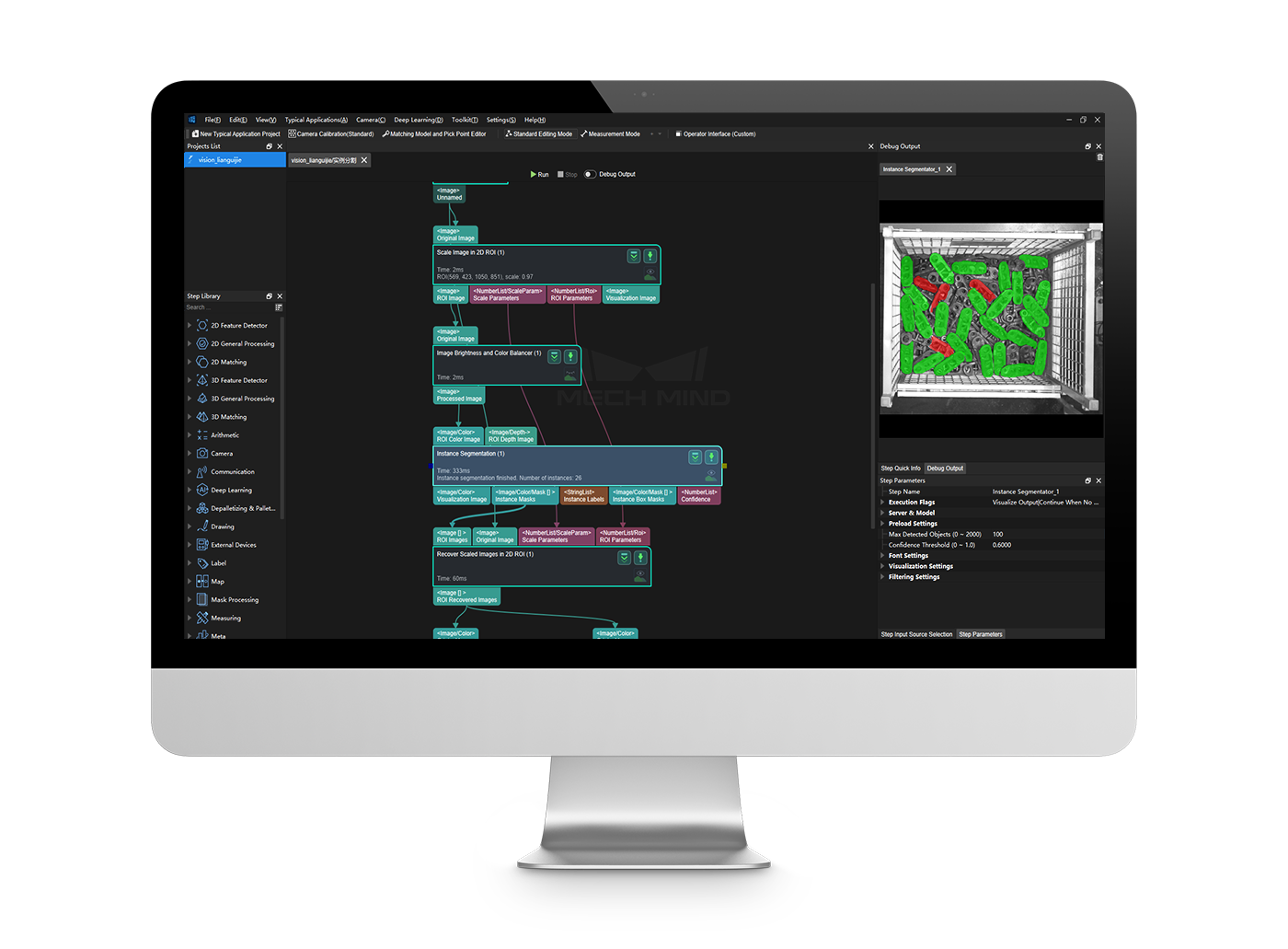
Détection d’objets
Grâce à leur capacité à capturer des images 3D haute résolution, les capteurs Mech-Eye servent à détecter la présence, la position et l’orientation d’objets dans l’environnement.

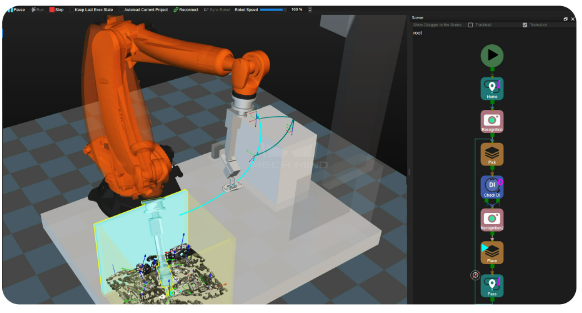
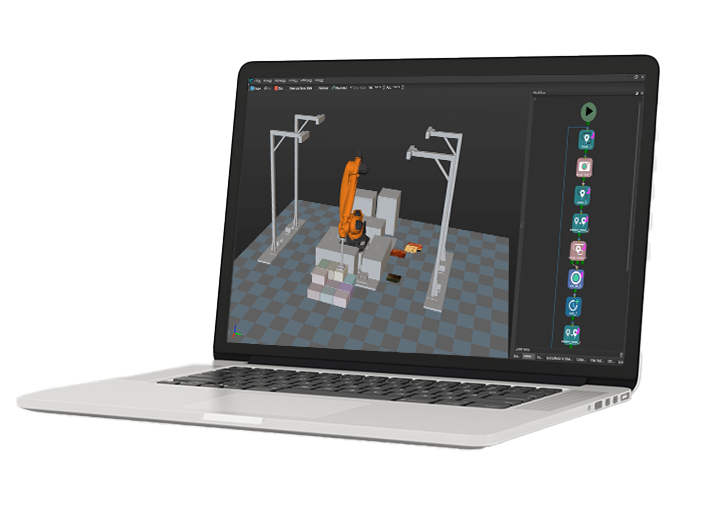
Pilotage de robot
Dans les applications robotiques, les capteurs Mech-Eye sont utilisés pour aider les robots à naviguer dans leur environnement et saisir les objets localisés. Les applications types sont la prise d’objets en vrac (BinPicking), la dépalettisation, le pick and place etc…
Inspection industrielle
Les capteurs peuvent être utilisés pour inspecter des pièces et des équipements industriels, vérifier la qualité des produits et détecter les défauts.
Conçus pour des environnements industriels difficiles, les capteurs Mech-Eye sont robustes et peuvent fonctionner de manière fiable dans diverses conditions
- La gamme de capteurs 3D Mech-Eye
| Model | NANO | PRO S | PRO M | PRO L | LSR L |
|---|---|---|---|---|---|
| Optimal scanning range (mm) | 300 – 600 | 500 – 1000 | 1000 – 2000 | 1200 – 3500 | 1500 – 3000 |
| Near FOV (mm) | 220×160 @ 0.3 m | 370×240 @ 0.5 m | 800×450 @ 1.0 m | 970×1160 @ 1.2 m | 1500×1200 @ 1.5 m |
| Far FOV (mm) | 430×320 @ 0.6m | 800×450 @ 1.0 m | 1500×890 @ 2.0 m | 2830×3320 @ 3.5 m | 3000×2400 @ 3.0m |
| Resolution | 1280×1024 | 1920×1200 | 1920×1200 | 2048×1536 | 2048×1536 |
| Megapixels | 1.3 MP | 2.3 MP | 2.3 MP | 3.0 MP | 0.5 mm @ 3m |
| Point Repeatability Z | 0.1 mm @ 0.5 m | 0.05 mm @ 1 m | 0.2 mm @ 2 m | 1.0 mm @ 3m | 1.0 mm @ 3m |
| VDI/VDE Accuracy | 0.1 mm @ 0.5 m | 0.1 mm @ 1 m | 0.2 mm @ 2 m | 3.0 mm @ 3m | 0.5 – 0.9 s |
| Typical capture time | 0.6 – 1.1 s | 0.3 – 0.6 s | 0.3 – 0.6 s | 0.7 – 1.1 s | 380 mm |
| Baseline | 68 mm | 180 mm | 270 mm | 400 mm | 459×77×86 mm |
| Dimensions | 145×51×85 mm | 265×57×100 mm | 353×57×100 mm | 481×98×145 mm | 2.9 |
| Weight (kg) | 0.7 | 1.6 | 1.9 | 4.3 | -10 – 45°C |
| Operating temperature | 0 – 45°C | 0 – 45°C | 0 – 45°C | 0 – 45°C | 0 – 45°C |
| interface | Ethernet | Ethernet | Ethernet | Ethernet | Ethernet |
| Laser safety level protection class | / | / | / | / | Class 2 |
Contacter un expert ADPIX
Nos experts par région