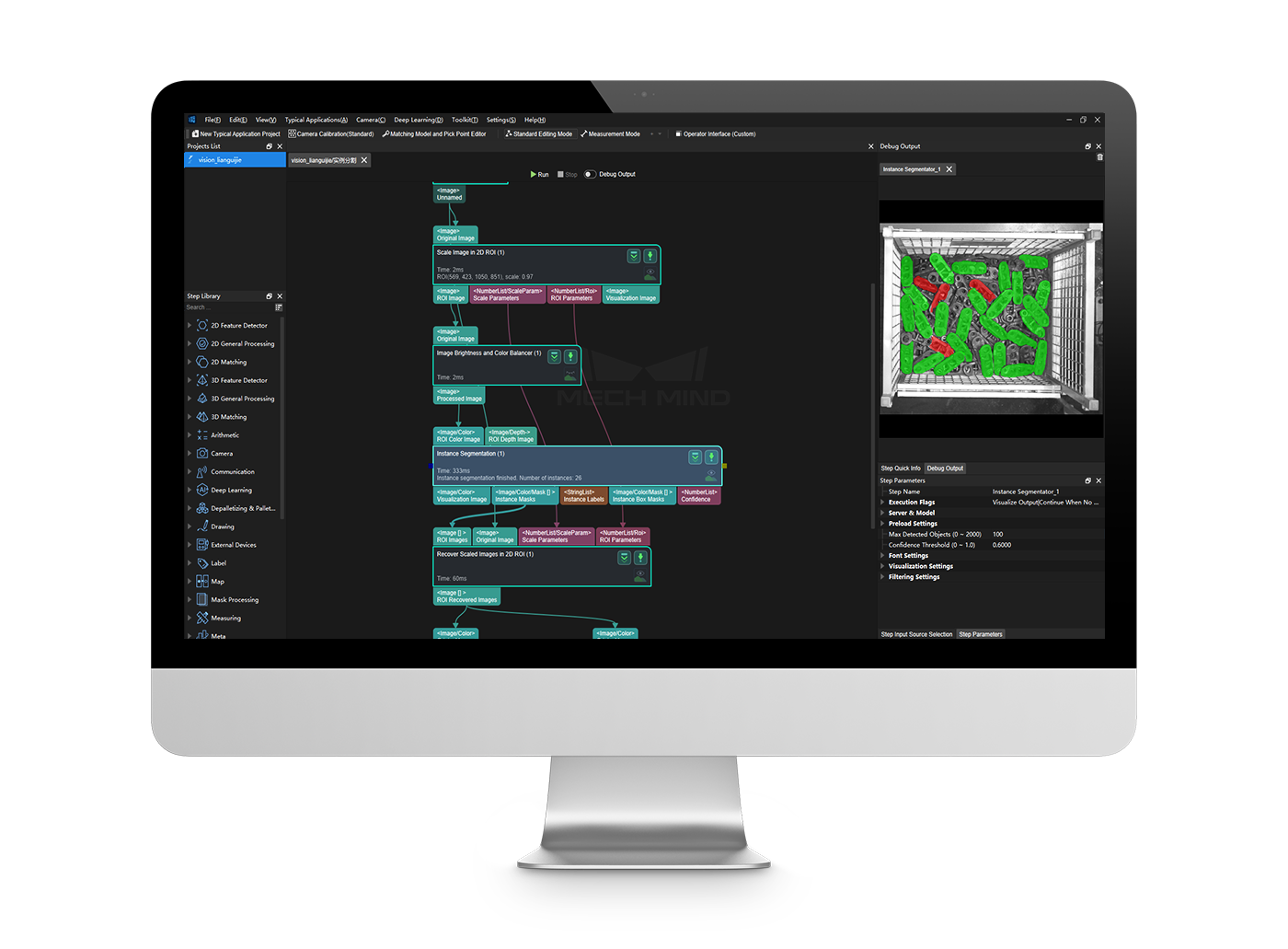
Logiciel Mech Viz
Via une interface de programmation sans code, Mech-Viz réalise votre application robotique. Plusieurs algorithmes intégrés (planification de trajectoires, détection de collisions et stratégies de préhension, etc.) garantissent d’excellentes performances. Il peut être adapté à la plupart des marques de robots grand public dans le monde
Le logiciel Mech-Viz permet le pilotage d’un robot dans les application de vision 3D, que ce soit en bin picking ou dépalletisation. Le logiciel calcule le point de préhension optimal sur l’objet détecté et génère des trajectoires sans collision. Chaque calcul de trajectoire est vérifié de manière autonome pour détecter d’éventuelles collisions.
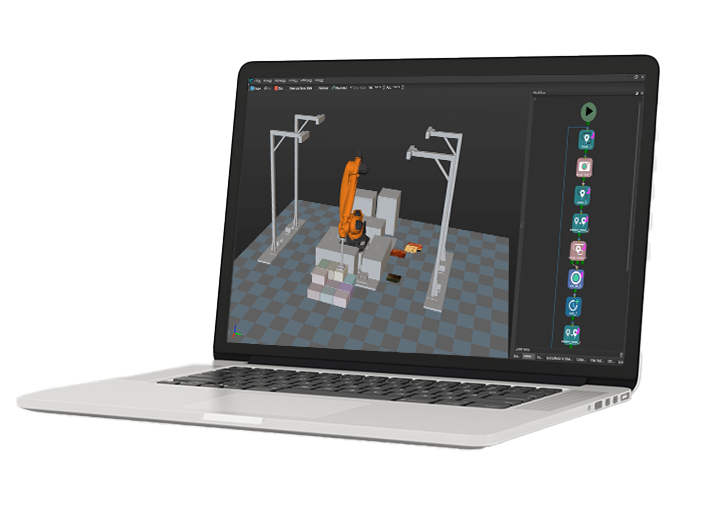
Mech-Viz simule graphiquement chaque déplacement du robot dans une vue 3D et ainsi optimise la séquence de mouvement avant la mise en service :
- Planification de trajectoire pour robots : En utilisant les données 3D, Mech-Vision peut aider à planifier les trajectoires pour les robots, en évitant les obstacles et en optimisant les mouvements.
- Intégration avec des systèmes robotiques : Mech-Viz est conçu pour s’intégrer facilement avec différents systèmes robotiques, permettant ainsi une automatisation avancée dans diverses applications industrielles.
- Interface utilisateur intuitive : Le logiciel est conçu pour être facile à utiliser, avec une interface utilisateur graphique qui permet aux opérateurs de configurer, de calibrer et de surveiller le système.
Mode de programmation unifié
Une construction sous forme d’organigramme complètement unifiée est adoptée pour la programmation du logiciel Mech-Viz : il n’est pas nécessaire pour les utilisateurs d’apprendre la logique du langage du robot, et indépendamment de sa marque.
Programmation sans code bas niveau
Les étapes de programmation du robot sont réalisées en ajoutant des modules de fonctions, en configurant les paramètres du module, et en connectant les modules entre eux de façon graphique.

Simulation 3D en un clic
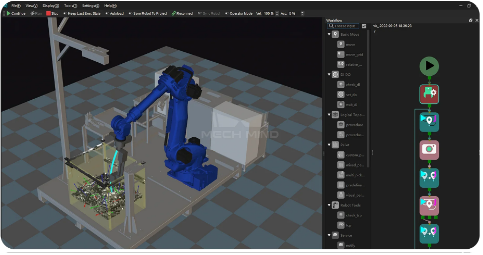
Le logiciel prend en charge la simulation de mouvement en “un clic” et affiche la trajectoire de mouvement du robot sous forme d’animation.
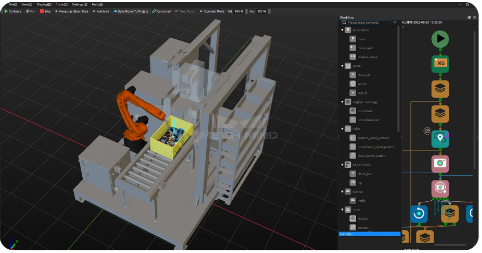
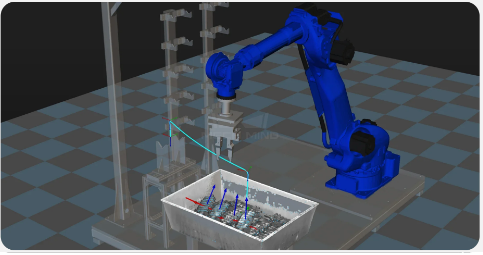
Planification de trajectoires
La planification de trajectoire fonctionne grâce à une variété d’algorithmes incluant la détection de collisions afin d’assurer une prédiction précoce des collisions possibles lors du mouvement du robot.
Stratégie de préhension
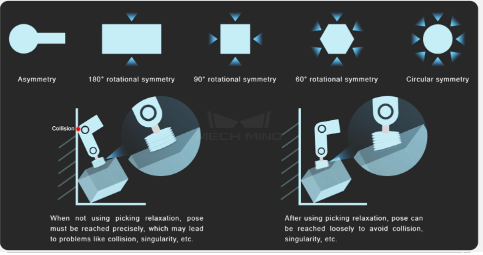
Le logiciel prend en charge les points de saisie multiples, les paramètres de marge et de symétrie de saisie, guidant le robot pour saisir les objets avec précision et éviter les collisions.
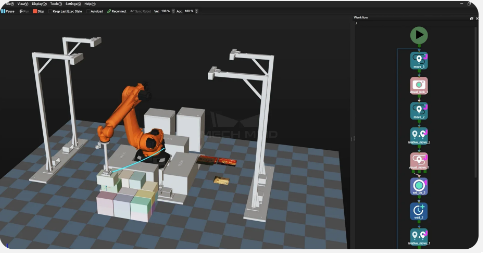
Algorithme de palettisation intégré
Le logiciel dispose d’algorithmes de paléttisation et permet la gestion manuelle de la palette, mais aussi sa gestion automatique. Palettisation mixte en ligne, mixte hors ligne, la palettisation continue, etc… de nombreux cas de figures d’ores et déjà traités.
Contacter un expert ADPIX
Nos experts par région